High Altitude Balloon
2014. Airborne environmental sensing platform
Built a high altitude environmental sensing platform to test a new sensor fusion algorithm.
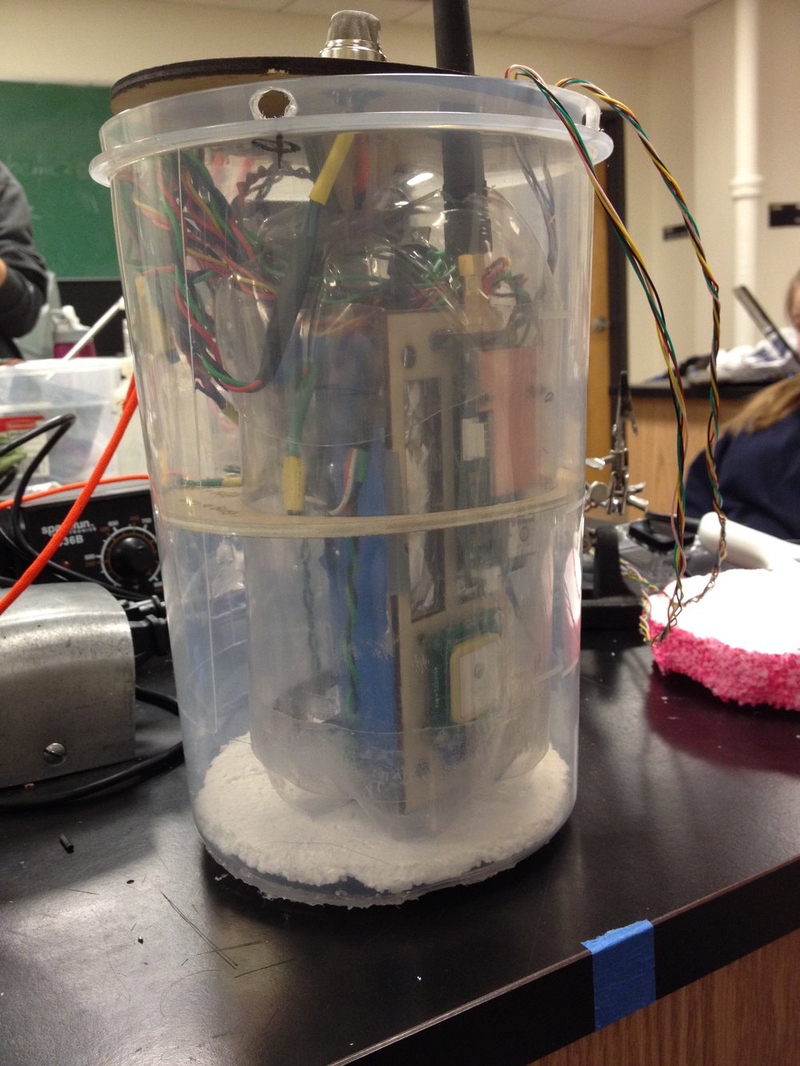
I worked with AIAA Northeastern to build a high altitude balloon research platform. The vehicle was equipped with a wide array of sensors: 2x HD cameras, 4x light sensors, 4x temperature sensors, an air pressure transducer, an altimeter, a GPS receiver, a gyroscope, an accelerometer, a magnetometer, and an onboard power monitoring system. All data was logged to an onboard SD card logging at up to 50Hz. GPS and altitude data were additionally broadcast live to the APRS radio network. An automatic recovery system was installed, allowing the balloon to cut its own parachute cord should it become trapped in a tree.
The platform was designed to conduct a number of experiments:
- I developed a sensor fusion algorithm to automatically stabilize and track the motion of the two on-board cameras using motion data collected by the gyroscope, accelerometer, and magnetometer.
- The avionics bay used an experimental greenhouse-like construction technique consisting of concentric clear plastic capsules intended to trap heat and maximize the lifespan of the embedded electronics. Four temperature sensors were installed (external, outer air gap, inner air gap, on-chip) to monitor the effectiveness of this design.
- The communications system served as an altitude, distance, and propagation test for the viability of using APRS to track rockets.
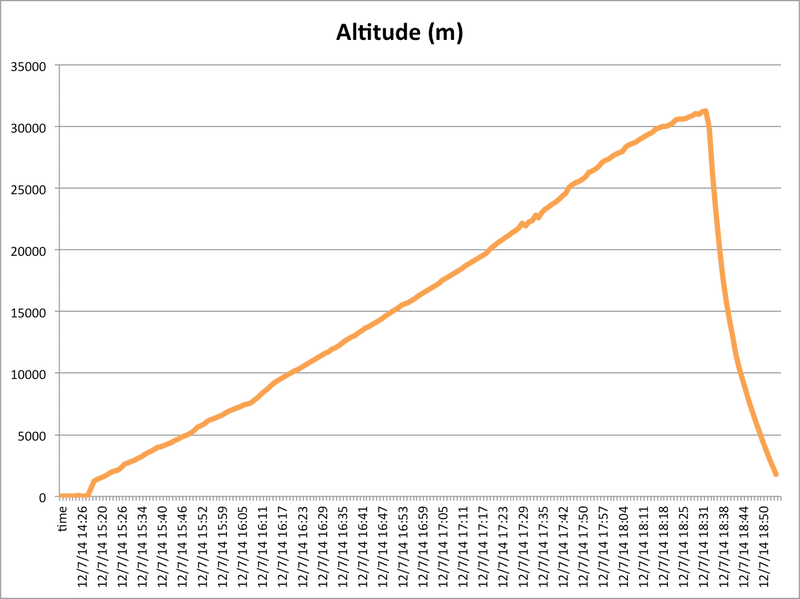
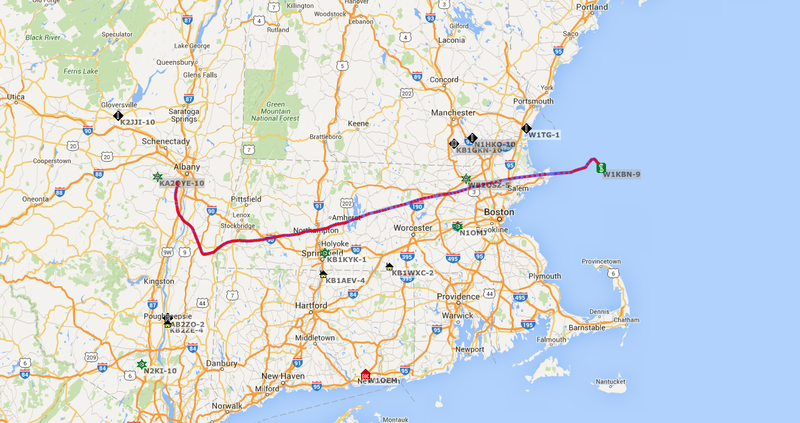
Unfortunately, we miscalculated the amount of helium needed and the strength of the wind on launch day. Rather than landing west of Boston, MA as planned, the balloon crashed into the ocean and we lost contact. The only data we managed to recover was the GPS information (received by radio), as the SD card containing the sensor data remains lost at sea.
Skills: electrical engineering, embedded programming, fabrication, systems engineering